ドローン自律飛行のためのネットワーク構築
近年,小型のUAV(Unmanned Aerial Vehicle:無人航空機),所謂ドローンを用いた様々なサービスが考案され,その実用化に向けて様々な検討が実施されています.一般に,現在のドローンは操縦者がその飛行を制御し,空撮や農薬散布などの作業を行っていますが,複数台のドローンを用いた飛行を行う場合,その台数分だけ操縦者が必要となります.また,荷物配送などにドローンを用いる場合,自律制御によってその飛行をコントロールする必要があります.
本研究室では,複数のドローン同時に飛行を行う際に,ドローン間で飛行に必要な情報を相互通信する基盤となる自律分散ネットワーク構築について研究を行っています.
現在検討を行っているネットワーク構築及び飛行制御では,
- 無線アドホックネットワークによるネットワーク構築
- 相対位置に基づく飛行制御アルゴリズム
- 自律飛行制御プログラム
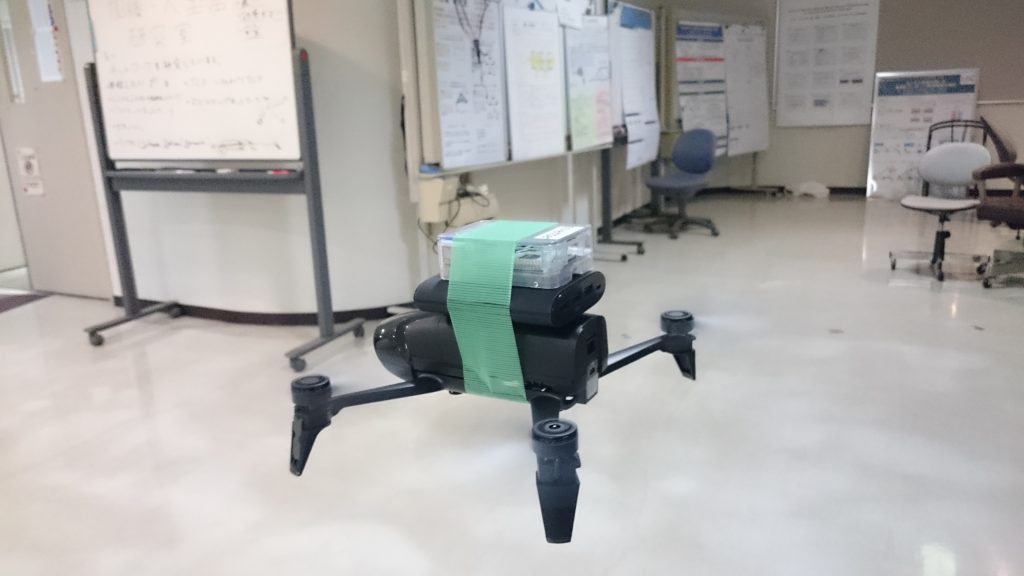
を主な課題とし,ドローンの実機及びRaspberry Piを用いた実機実装をベースに研究を行っています.
また,より現実的な応用として,地上に構築されたセンサネットワークの情報を上空を飛行するドローンにて収集するための通信方式や飛行経路策定のための方式についての検討も行っています.